Vision
Your robot is able to use a webcam to detect Fiducial Markers.
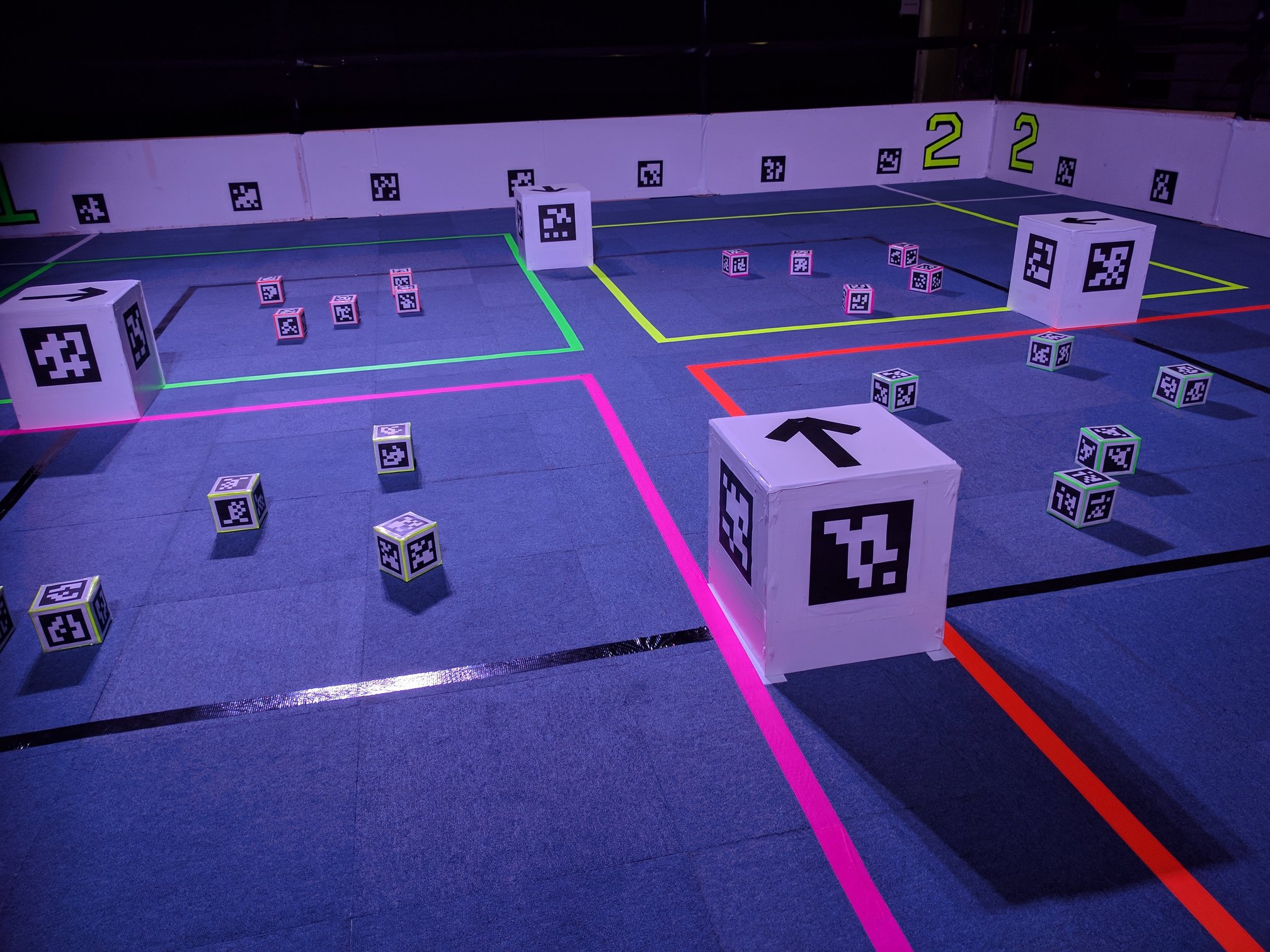
Specifically it will detect AprilTags, using the 36H11 marker set.
Each of these markers acts like a QR-code, encoding a number in a machine-readable way so the robot can identify them.
Using Pose Estimation, it can calculate the orientation and position of the marker relative to the webcam. Markers are attached to various items in the arena, in known locations. Using the marker's poses and their locations, we can either calculate the location of object relative to the robot or the position of the robot relative to the arena.
For information on markers, see the markers page.
Camera
The interface to the vision system is through the camera, accessible through the vision module.
Searching for markers
Assuming you have a webcam connected, you can use vision.detect_markers() to take a picture.
The software will process the picture and return a list of Marker instances, each of which describes one of the markers that were found in the image.
from sbot import vision
markers = vision.detect_markers()
Here's an example that will repeatedly print out the distance, in meters, to each marker that the robot can see:
from sbot import vision
while True:
markers = vision.detect_markers()
print("I can see", len(markers), "markers:")
for marker in markers:
print("Marker #{0} is {1} metres away".format(
marker.id,
marker.position.distance / 1000,
))
Taking images while moving will cause them to be blurry, which will cause marker detection to fail. Try pausing movement while taking an image.
Saving camera output
You can also save a snapshot of what your webcam is currently seeing. This can be useful to debug your code.
This is done by adding the save parameter to the detect_markers function.
The parameter should be the filename to where you want to save the image.
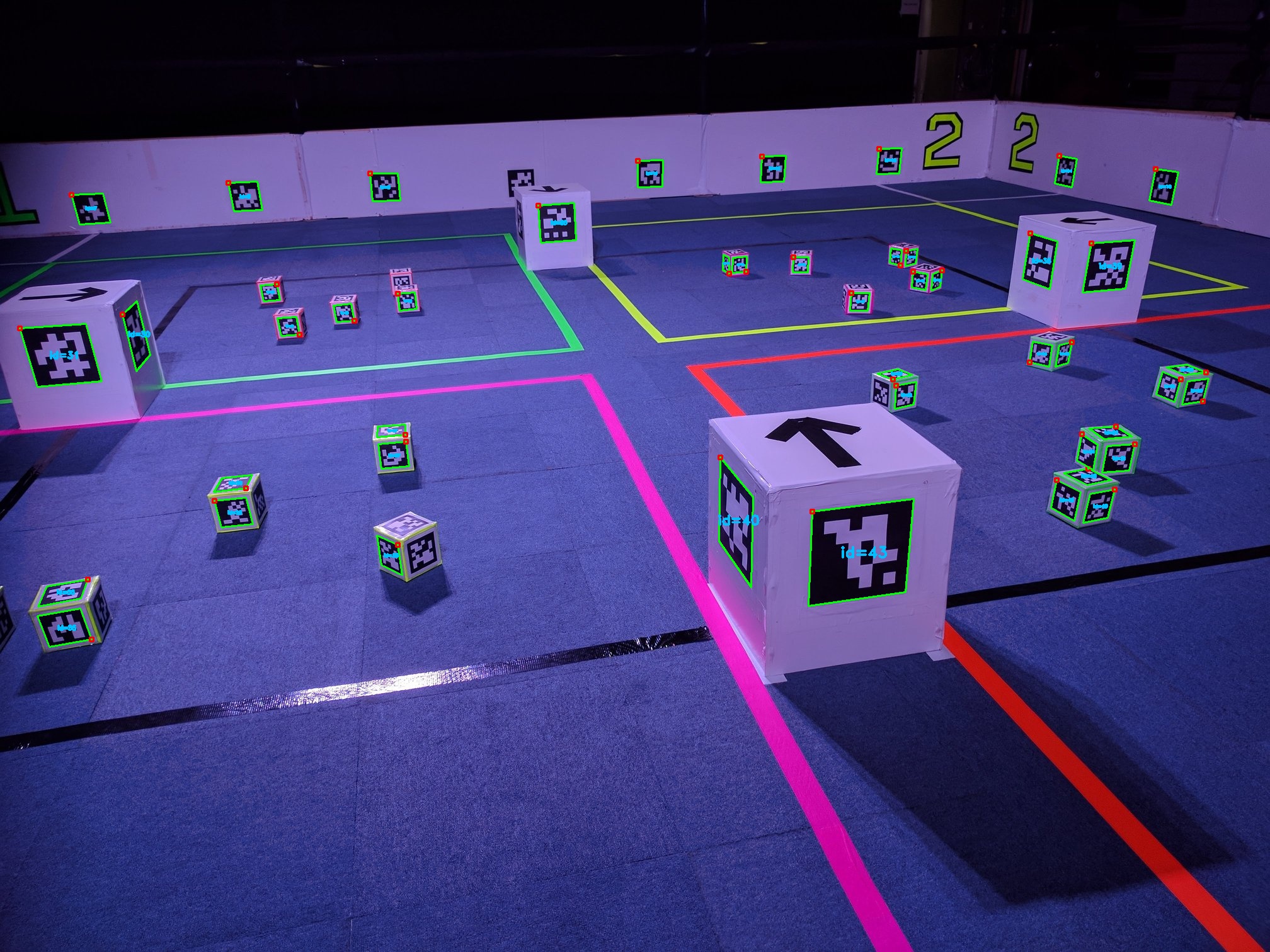
Every marker that your robot can see will have a square annotated around it, with a red dot indicating the top left corner of the marker. The ID of every marker is also written next to it.
Snapshots are saved to your USB drive, and can be viewed on another computer.
from sbot import vision
markers = vision.detect_markers(save="snapshot.jpg")
Markers
Each marker object in the list contains information about a detected marker. It has the following attributes:
- id
- The numeric identifier of the marker that can be used to determine what object it represents.
- size
- The physical size of the marker in millimetres, as the vision system expects it.
- pixel_centre
- A
PixelCoordinatesobject describing the position of the centre of the marker in the image. - pixel_corners
- A list of 4
PixelCoordinatesobjects, each representing the position of a corner of the marker in the image.
- position
A
Positionobject describing the position of the marker. See the Position page for detailed definitions and diagrams.- distance
- The distance between the camera and the centre of the marker, in millimetres.
- horizontal_angle
- Horizontal angle from the centre of the camera's view to the marker, in radians. Ranges -π to π. Directly in front is zero, positive to the right.
- vertical_angle
- Vertical angle from the centre of the camera's view to the marker, in radians. Ranges -π to π. Directly in front is zero, positive values upwards.
- orientation
An
Orientationinstance describing the orientation of the marker. See the Orientation page for detailed definitions and diagrams.- yaw
- The yaw of the marker, a rotation about the vertical axis, in radians. Positive values indicate a rotation clockwise from the perspective of the marker. Zero values have the marker facing the camera square-on.
- pitch
- The pitch of the marker, a rotation about the transverse axis, in radians. Positive values indicate a rotation upwards from the perspective of the marker. Zero values have the marker facing the camera square-on.
- roll
- The roll of the marker, a rotation about the longitudinal axis, in radians. Positive values indicate a rotation clockwise from the perspective of the marker. Zero values have the marker facing the camera square-on.
You can use the math.degrees function to convert from radians to degrees.
Positioning Information
The combination of the position and orientation attributes of the marker provide a complete description of the physical location and orientation of the marker relative to the camera.
The position attribute describes where the marker is, relative to the camera, in 3D space.
See the Position page for detailed definitions and diagrams.
The orientation attribute describes how the marker is rotated around its center.
See the Orientation page for detailed definitions and diagrams.
Pixel Coordinates
The positions of various points on the marker within the image are exposed over the API. This is useful if you would like to perform your own Computer Vision calculations.
A named tuple of x and y coordinates for the point, in pixels.
Pixels are counted from the origin of the image, which
conventionally is in the top left corner of the image.
from sbot import vision
markers = vision.detect_markers()
for marker in markers:
# Print the x and y coordinates of the pixel location
print(marker.pixel_centre.x, marker.pixel_centre.y)